Exoskeleton 101
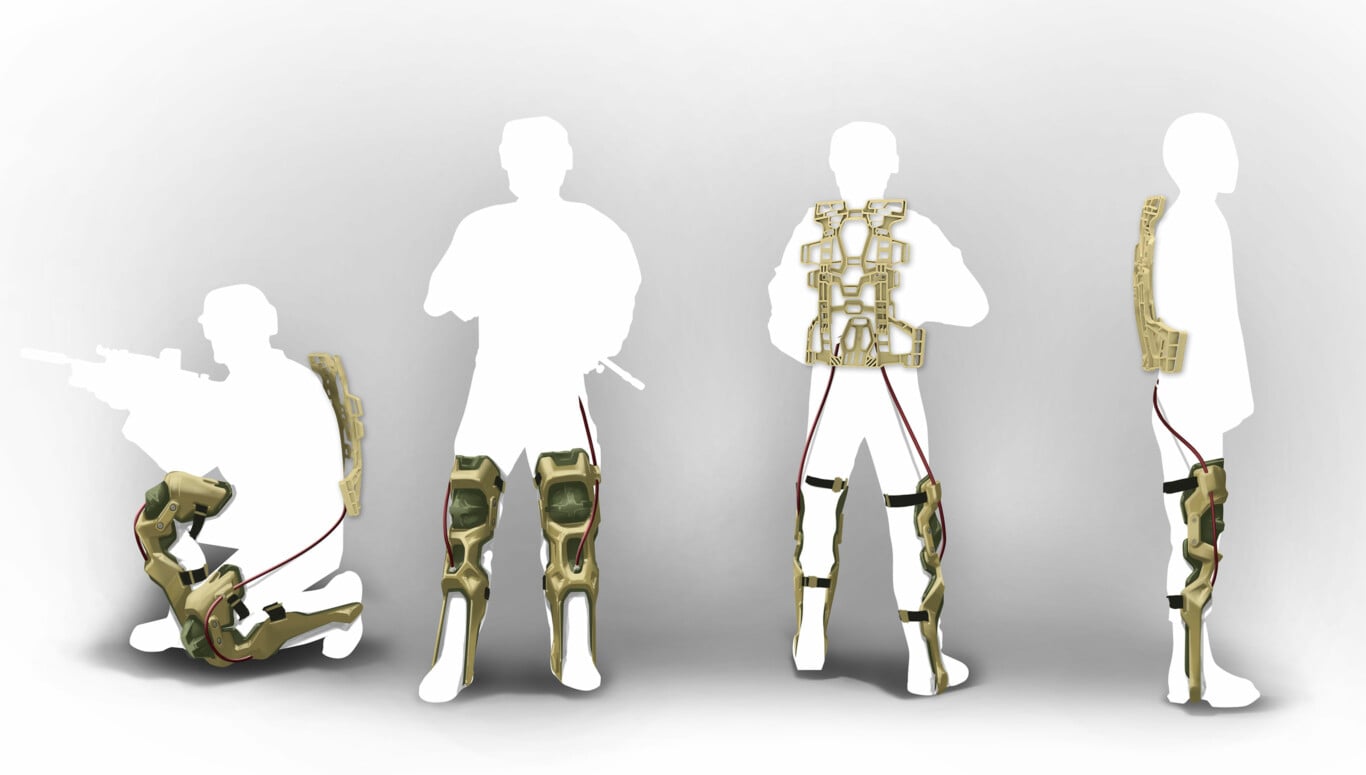
OX is a passive (unpowered) exoskeleton system that uses a semi-flexible cable system to transfer a controlled proportion of the weight of a heavy backpack off the wearer’s skeletal system. Initially developed by Defence Science and Technology Group (DST), the system was intended for use by Australian soldiers to ease the burden of excessive and frequent load carriage. Cobalt was selected as part of a competitive tender to take DST’s exoskeleton concept to the next level of design development.
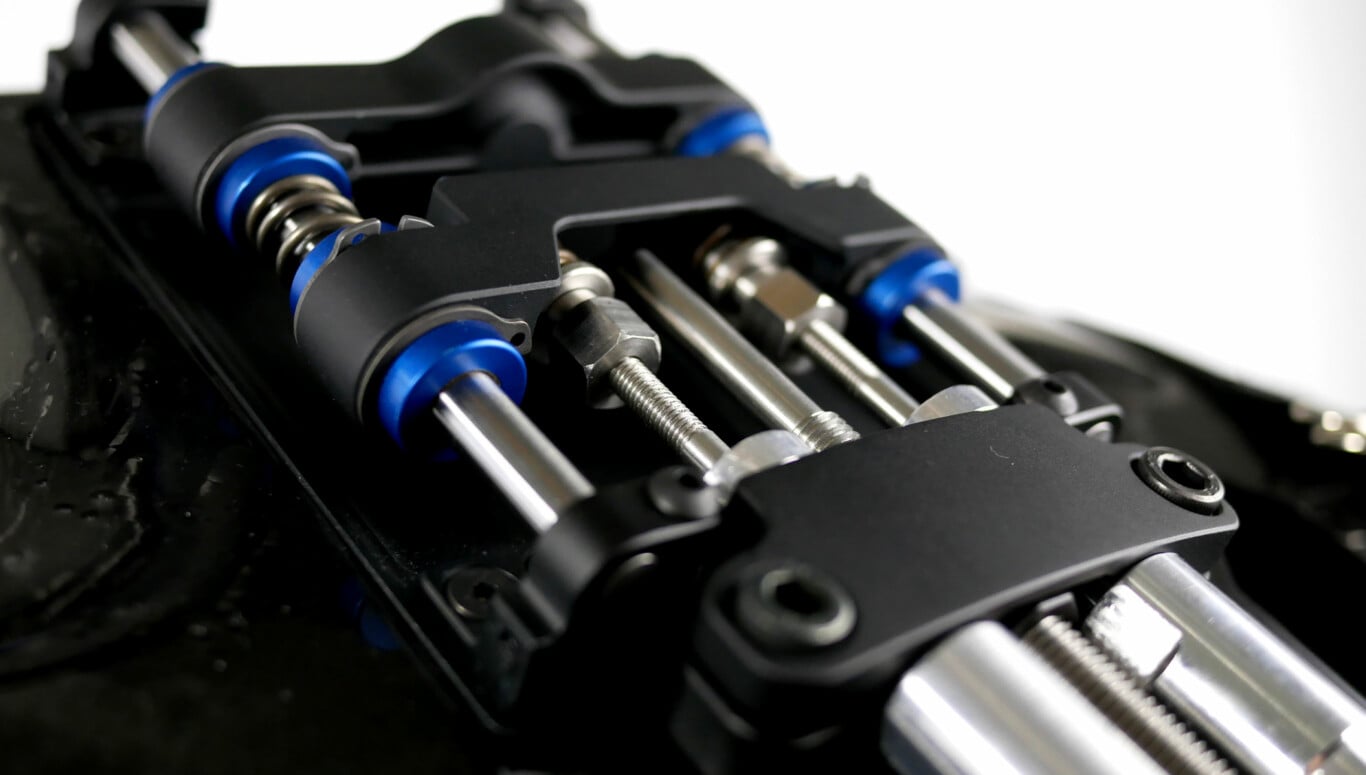
DST’s Project Lead Tom Chapman had developed OX to early (TR3 level) prototypes. These successfully transferred loads, even during bent leg positions. His work had enough merit to justify external development by Cobalt to further validate the concept and take it to a far more advanced level (TR5+ level).
In contrast to powered exoskeletons, OX is lightweight, low cost, adjustable and easily put on and removed. However, without the addition of a separate power source, use of the system would come at some metabolic cost to the user. The design challenge was to develop a system that maximised the benefit of load carriage reduction whilst minimising this metabolic cost to the user.
Through a two-year, multi-phase development project, Cobalt designed, engineered, tested and optimised the exoskeleton, culminating in TRL5 level working prototypes ready for extended testing by a variety of military personnel replicating expected operational demands.



The Team We believe good design happens by expert people working as a team.
Kynan Taylor Project Leader

Ben Goodwin

Nat Hunt

Chris Morrish

Libby Christmas

Marcus Krigsman

Nathan Scanlon
Steve Martinuzzo


I can’t speak highly enough of the ‘above and beyond’ attitude of the Cobalt team as they shared the passion of this ‘crazy’ concept with me. Shared passion is not something tangible you can write in a contract, but it’s something that I witnessed in abundance with the team at Cobalt.
Tom Chapman Defence Science and Technology Group OX Project Lead


Rethinking the Future
To date, exoskeleton development for military applications has been primarily focused on powered and motorised systems. These mechanically complex devices effectively turn wearers into hybridised robots. So far, this approach has been favoured by big defence industry players and has resulted in heavy, complex, and expensive devices that need to be tailored for each wearer. The impracticalities of batteries and regular recharging within tactical operations also pose fundamental safety and redundancy limitations to these systems.
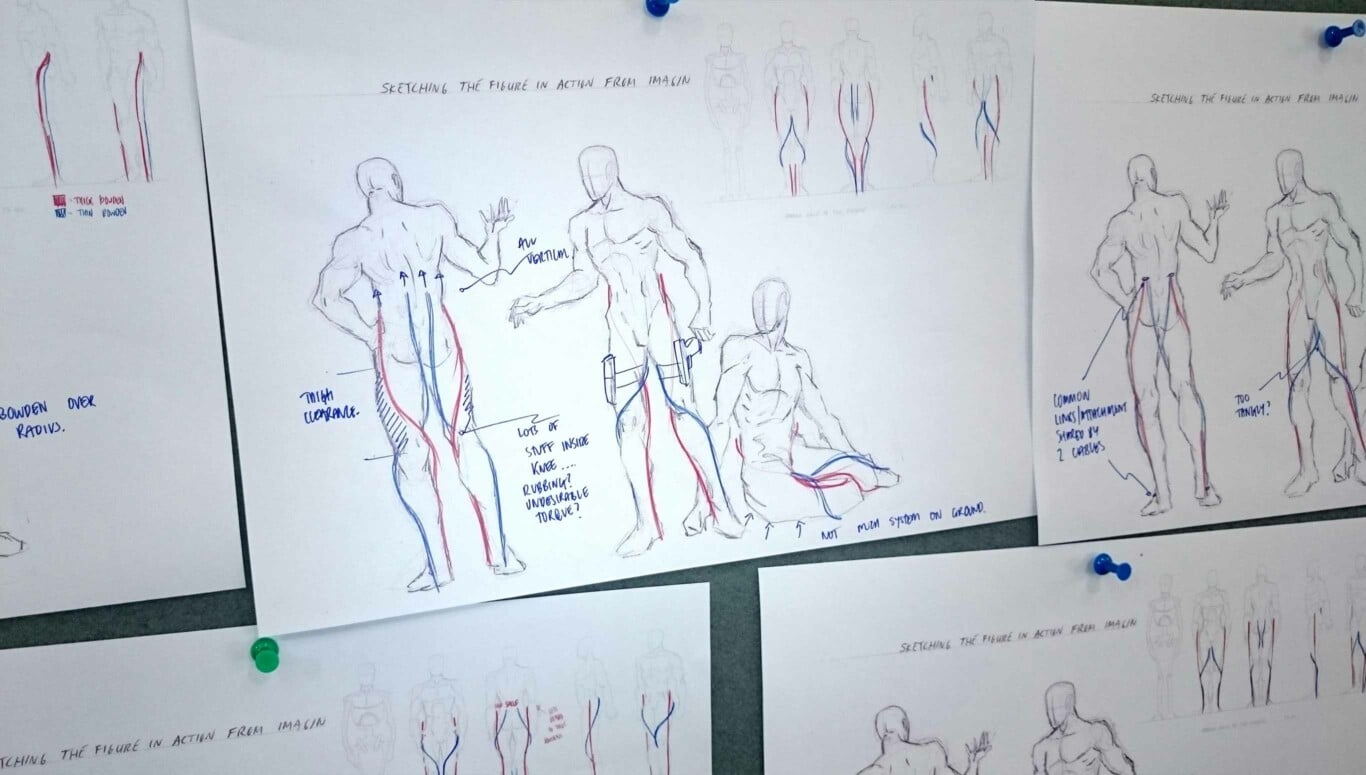
DST’s concept, developed by Tom Chapman – or OX as it is known – takes a completely different, almost acoustic approach. The human gait has evolved to be a very efficient process, and any disruption to this results in a steep rise in metabolic cost. OX aims to offset loads from the user, without providing any additional energy input, therefore requiring the wearer to support and actuate the system. The challenge with this approach is to balance the metabolic cost of this against the ‘benefit’ of reduced loads and impacts on the wearer’s musculoskeletal system.







Other Work
One299 Pack Frame
An external backpack frame that easily adjusts to conform to the user.
eShepherd
Virtual fencing for modern farming.